Non-linear Planning in AI
Overview
Artificial Intelligence (AI) has revolutionized the way we live and work. It is the intelligence demonstrated by machines that mimic human behavior, including learning, problem-solving, and decision-making. One of the key areas of AI is planning, which involves generating a sequence of actions that achieves a goal.
In this article, we will focus on Non-Linear Planning in AI, which is a type of Planning that involves decision-making in a dynamic and uncertain environment.
Introduction
In AI, Planning is a crucial component that enables agents to achieve their goals autonomously. However, traditional planning techniques often assume that the world is deterministic and the agent has complete knowledge of its environment. Non-Linear Planning in AI, on the other hand, allows for decision-making in an environment that is dynamic, uncertain, and has incomplete knowledge.
What is a Plan?
To create a planning system, we need to provide a domain description, task specification, and goal description. A plan consists of a sequence of actions, each with its own set of preconditions that must be met before the action can be executed, as well as effects that can be positive or negative.
At a basic level, there are two types of planning:
- Forward State Space Planning (FSSP)
- Backward State Space Planning (BSSP)
FSSP uses a forwarding state-space search approach to progress from an initial state to a target state by taking actions along the way. "The algorithm is sound but has a large branching factor".
BSSP uses a backward state-space search approach to progress from a target state to a sub-goal by tracing the previous actions that led to that goal. "This algorithm has a small branching factor but is only sometimes sound as inconsistencies may arise".
To create an efficient planning system, combining the features of both FSSP and BSSP is necessary, which results in Target Stack Planning.
What is Planning in AI?
Planning in Artificial Intelligence involves making decisions and taking action toward achieving a specific goal. The process of executing a plan consists in selecting a sequence of tasks that have a high likelihood of achieving the desired objective.
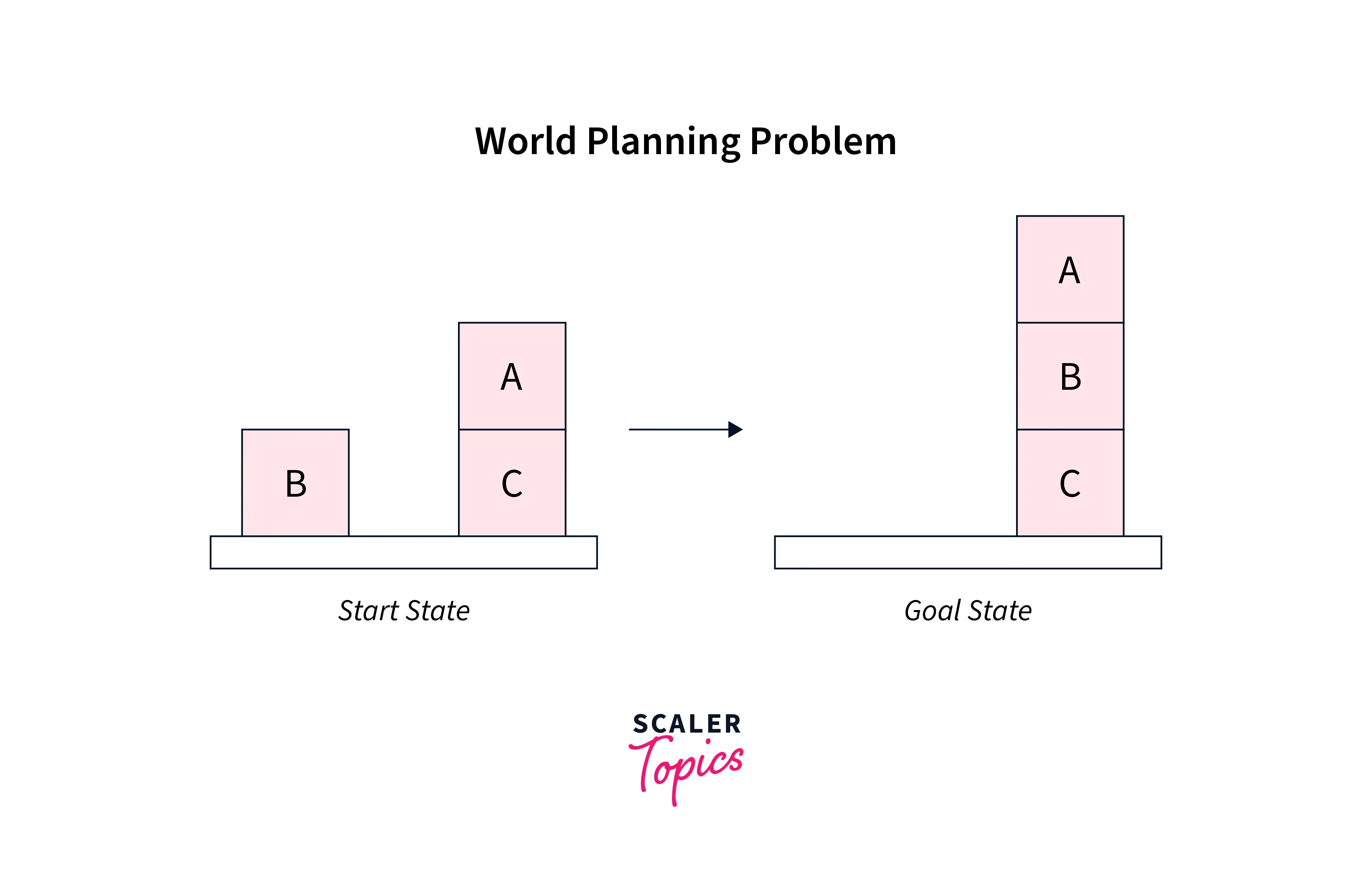
Block-world Planning Problem
The block-world planning problem, also known as the Sussmann anomaly, was considered odd in the early 1970s since non-interleaved planners could not solve it.
- This problem involves three blocks labeled A, B, and C resting on a flat surface, and the objective is to move only one block at a time to reach the goal state.
- When given two sub-goals, G1 and G2, non-interleaved planners (here planner focuses on one sub-goal at a time, without switching back and forth between the two) would either produce a plan for G1 that is combined with a plan for G2 or vice versa.
The start position and target position are depicted as follows:
The planning system has several important components, which include:
- Selecting the best rule based on available information
- Applying the chosen rule to update the problem condition
- Detecting dead ends
- Redirecting the system toward more useful directions
The system also identifies when a solution or a near-perfect solution is found.
Target Stack Plan
The STRIPS (Stanford Research Institute Problem Solver) planning algorithm utilizes a Target stack plan as a crucial component to achieving targets. Using Stacks allows the algorithm to capture actions necessary to complete a target while a knowledge base holds the current situation and actions.
Similar to a node in a search tree, a target stack creates branches with a choice of action. The algorithm follows the following steps:
- Begin by pushing the original target onto the stack. Repeat until the pile is empty.
- If the top of the stack is a mixed target, push its unsatisfied sub-targets onto the stack.
- If the top of the stack is a single unsatisfied target, replace it with an action and push the action precondition to the stack to satisfy the condition.
- If the top of the stack is an action, pop it off, execute it, and update the knowledge base with the action's effect.
- If the top of the stack is a satisfactory target, pop it off.
What is Non-Linear Planning in AI?
This planning technique involves creating a goal stack and incorporating it into the search space of all potential sub-goal sequences. It addresses interactions between goals by utilizing the interleaving method.
Introduction
Non-Linear Planning in AI is an essential problem-solving approach that deals with complex situations where the solution is not easily predicted. "It involves finding a sequence of actions that transforms the system's current state to the desired goal state while also considering non-linear constraints, such as resource limitations or temporal ordering". Non-Linear Planning is commonly used in robotics, scheduling, and logistics to solve challenging problems.
Algorithm
- Select a goal, denoted as g, from the set of goals
- If the current state does not match the goal g, then select an operator o whose add-list matches the goal g
- Push the operator o onto the OpenStack and add the preconditions of o to the set of goals
- Continue this process while all preconditions of the operator on top of the OpenStack are satisfied in the current state
- Pop the operator o from the top of the OpenStack, apply it to the current state, and add it to the plan
Advantages and Disadvantages of Non-Linear Planning in AI
Non-Linear planning in AI has several advantages, including:
- Flexibility:
Non-Linear Planning can handle complex problem spaces that involve multiple, interdependent sub-goals with non-linear dependencies. - Optimality:
Non-Linear Planning algorithms often use heuristic search techniques to find the optimal solution. - Resource utilization:
Non-Linear Planning considers resource limitations and temporal ordering constraints when generating a plan. - Reusability:
Non-Linear Planning in AI can reuse previously generated plans for similar problems, thus reducing the computational overhead required for solving similar problems and improving the efficiency of the planning process. - Integration:
Non-Linear Planning can be integrated with other AI techniques, such as machine learning and decision-making algorithms, to create more robust and adaptable problem-solving systems.
While Non-Linear planning in AI has many advantages, there are also some disadvantages, including:
- Complexity:
Non-Linear Planning in AI involves dealing with complex and interconnected sub-goals. This complexity can make the planning process more challenging, increasing the computational overhead and time required to generate a plan. - Scalability:
Non-Linear Planning may need to be more scalable to large problem spaces. As the number of sub-goals and dependencies increases, the search space can become too large to explore efficiently. - Uncertainty:
Non-Linear Planning assumes a deterministic world in which actions have predictable outcomes. However, real-world problems often involve uncertainty, and the outcomes of actions may be difficult to predict accurately. - Domain expertise:
Non-Linear Planning relies on domain expertise to generate effective plans. With sufficient domain knowledge, defining appropriate sub-goals, identifying relevant actions, and specifying their dependencies may be more accessible.
Conclusion
- Non-Linear Planning in AI is an advanced problem-solving approach used to solve complex situations where the solution is not easily predicted.
- Non-Linear Planning in AI offers a range of benefits, including flexibility, optimality, and the ability to handle complex problem spaces.
- Non-Linear Planning enables agents to make decisions in a dynamic and uncertain environment and find the optimal solution using heuristic search techniques.
- As AI advances, Non-Linear Planning will likely play an increasingly important role in solving complex real-world problems.