A* Algorithm in AI

Search algorithms retrieve elements from data structures, essential for accessing specific items. Pathfinding, integral to this, determines optimal routes from one point to another. The A* algorithm stands out in artificial intelligence and computer science, efficiently finding optimal paths. Understanding A* is vital due to its pivotal role across various applications.
What is A* Algorithm in AI?
A* Search algorithm is a searching algorithm that searches for the path with the least cost between the initial and final state. It is one of the best and most popular methods out there, that are used in path-finding in graphs.
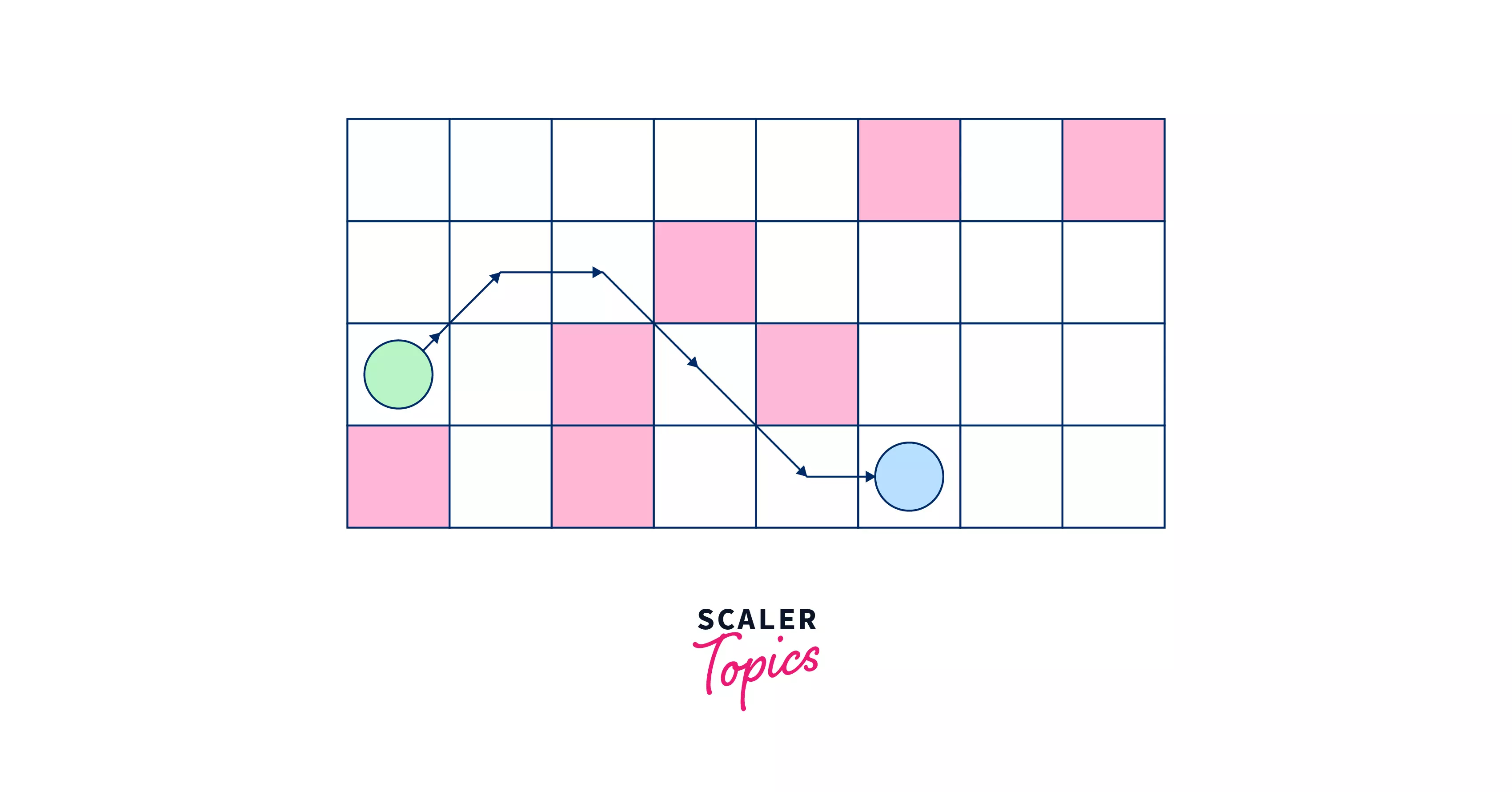
To relate the path with least-cost in real-life like Maps, games, etc. Like we can consider a 2-Dimensional board containing a source cell (colored green), destination cell (colored blue), and some obstacles (colored red).
Why A* Algorithm in AI?
Informally speaking,A*algorithm unlike other searching techniques is "intelligent". It is because it searches for the shorter paths rather than searching for longer paths first, that makes it optimal as well as a complete algorithm.
Here optimal means, it is sure that A* search algorithm will find the shortest path (if it exists) for a given graph/board and completeness means if the solution exists then it is guaranteed that the algorithm will find the solution in a finite amount of time.
Now the question would arise, why would one use the A* search algorithm over other popular algorithms like Dijkstra's algorithm.
It is because Dijkstra's algorithm always proceeds with the path with the least cost without even considering whether the taken path will lead us close to the destination or not.
On the other hand, the A* algorithm takes the most optimal path from its current position to reach closer to the destination.
How Does theA* Algorithm in AI Work?
Before continuing with the actual working of the A* algorithm let's have a look at some key terms:
- -- It is the cost incurred in moving from the initial cell (src) to the current cell. In the case of a board cost is nothing but the number of cells that have been visited since leaving the source cell.
- -- It is known as the heuristic value, it is the estimated cost of reaching the final cell (dest cell) from the current cell. Note that, is not the actual value but an estimation so we must take care that is not overestimated.
- -- It is the sum of the values of and . Hence,
To make the decision (where to go in the next step), the algorithm takes the value into account. Greedily, it selects the minimum possible value to process the current cell.
What is a Heuristic Function?
Heuristic function (or simply heuristic) is nothing but a shortcut to solve a given problem (by making approximations) when either the exact solution is non-existing or it takes huge time to find the same.
You will always see the terms admissibility and consistency associated with heuristics, let us understand what they are -
- Admissibility - A heuristic function is said to be admissible if it never overestimates the cost/price of reaching the target. In other words, it can be said that the estimated cost should be less than or equal to the lowest possible cost.
- Consistency - In searching related problems, a heuristic function is said to be consistent if its estimate to reach the target is always less than or equal to the sum of estimated cost from any of its neighboring points and the cost of reaching that neighbor from current position.
As described above, it is the estimated cost of reaching the final cell (dest cell) from any given cell. Its value is denoted by , to find its value we make an approximation with the help of basic mathematical knowledge.
Mathematical tools we use to approximate the distance are -
-
Manhattan Distance -- It is the sum of absolute values of the difference between coordinates of the current node (say ) and the destination node (say ). It is defined as - It is taken into account when we are allowed to move in only four directions (North, South, East, and West) from the current node.
-
Diagonal Distance -- Here we calculate the cost (number of steps) required if we can't take a diagonal and then we subtract steps that can be saved by using the diagonal from it.
There are diagonal steps, and each step costs us but on the other hand, it saves non-diagonal steps. To keep things simple we take the values of and to be .
It is taken into account when we are allowed to move in 8 directions (just like the King in chess) from the current node.
Example of A* Algorithm
Let's assume we have the following board for the example with the green-colored cell as the source node and the blue-colored cell as the destination node, given that it is prohibited to pass any red filled cell.
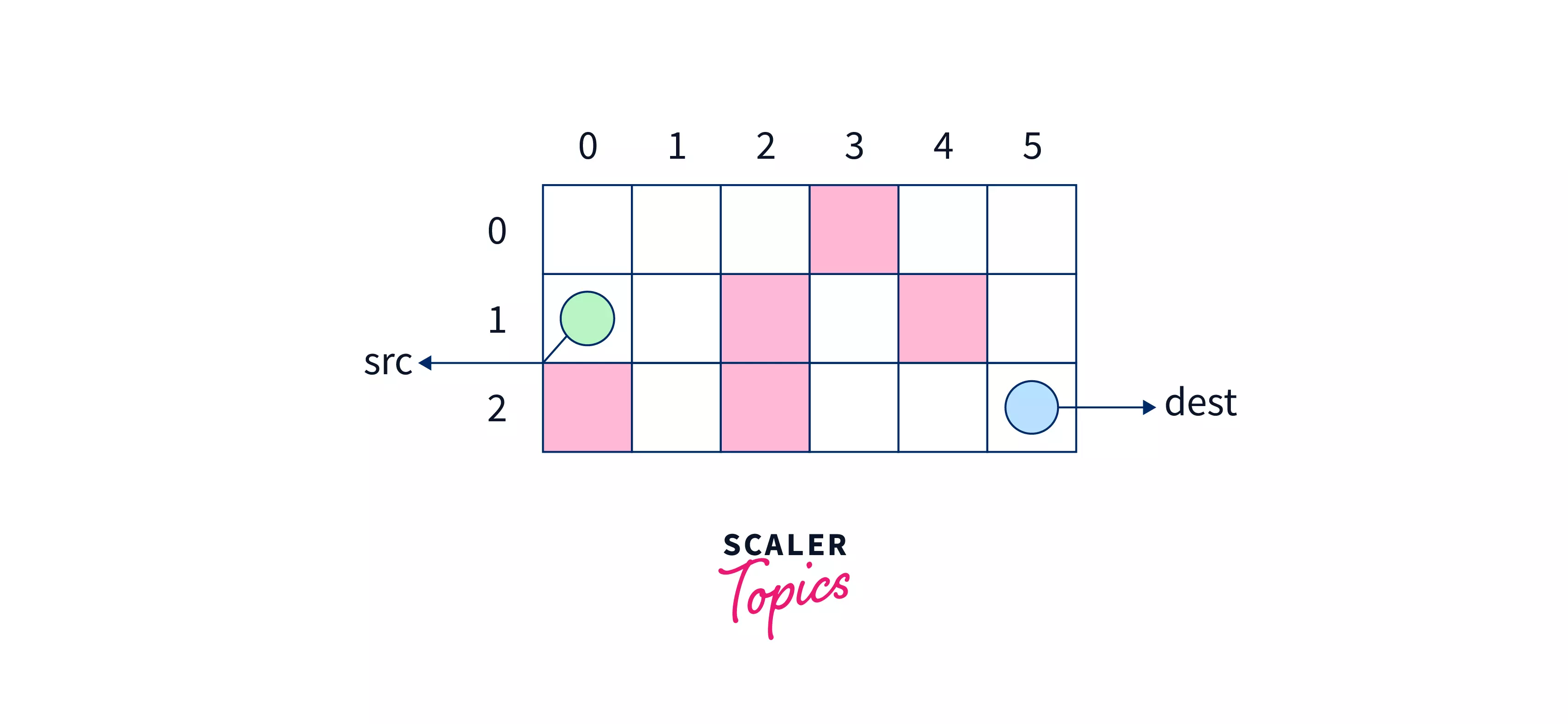
Here we are assuming that we can move in any of the 8 possible directions left-right, up-down, and diagonally upward/downwards. Let's assume the start node to be and the destination cell to be .
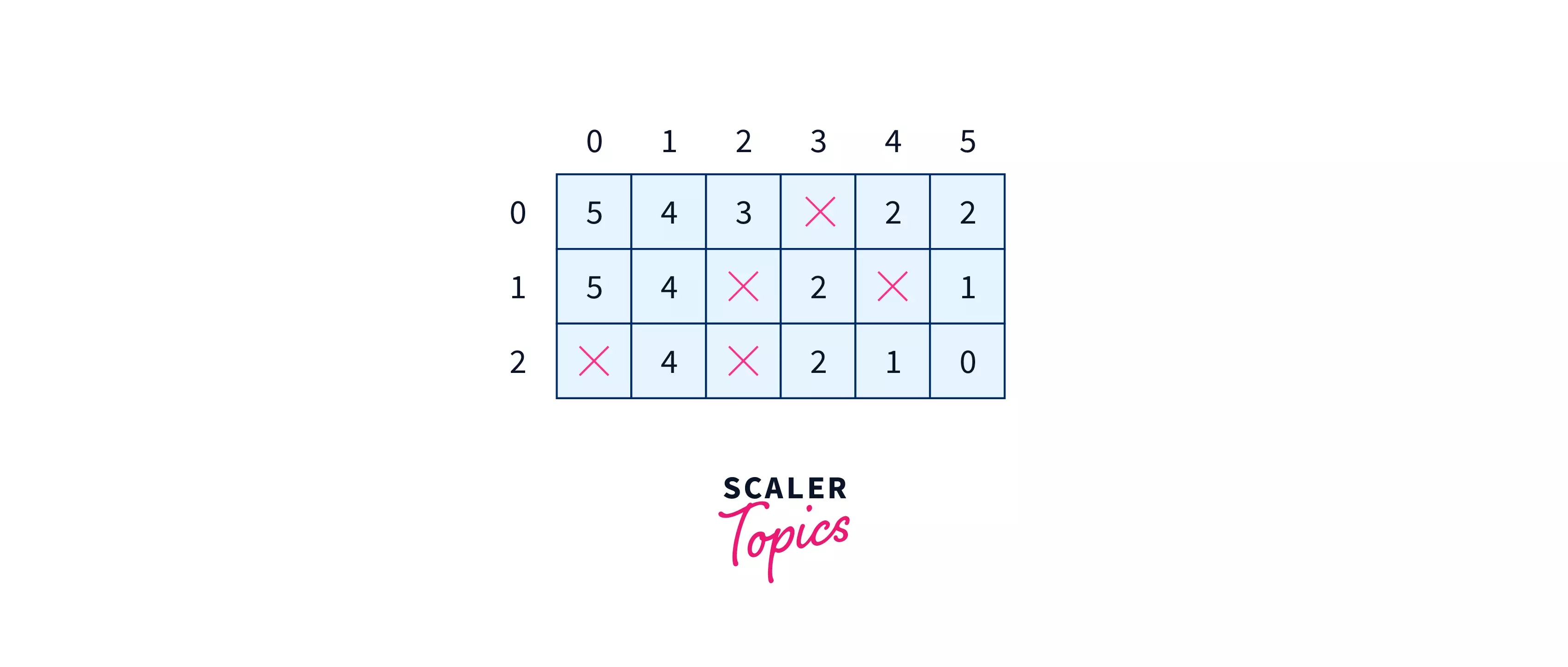
So we will be using Diagonal distance for the heuristic value. The heuristic values of all the cells to the destination will be calculated using the formulae -
The heuristic values when calculated will be like -
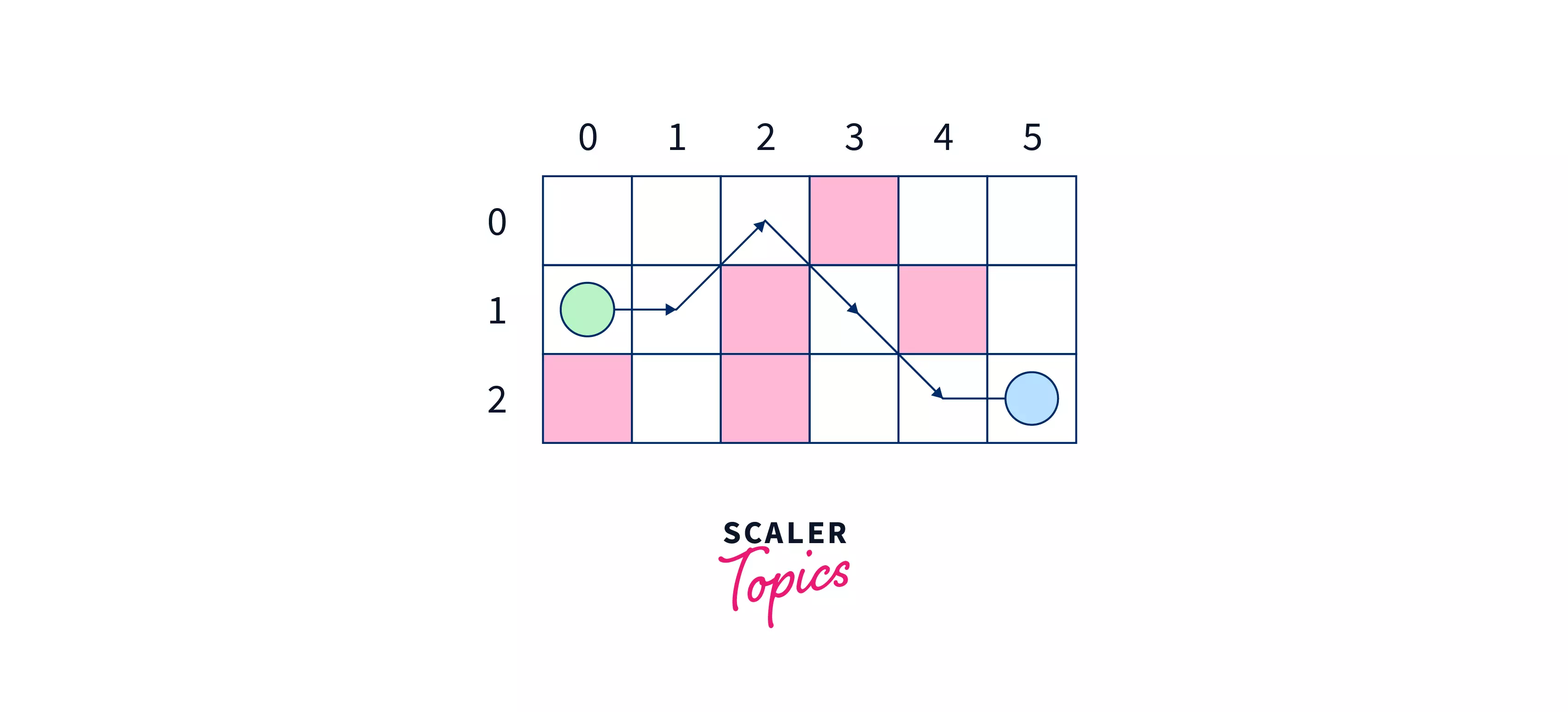
So steps involved in finding the path with minimum cost from the source node to the destination node will be -
- Step 1 - From cell we search for cell with the least heuristic value. We have three choices and with heuristic values as . We can pick any one of them, let's say we picked . Since we are moving at each step, therefore we will increase the value of after each step.
- Step 2 - From cell we again search for the cell with the least value. So, we are left with only one choice cell so we jump to it, and increase the value of by 1.
- Step 3 - Again at this cell, we have only one choice to go to cell .
- Step 4 - We search for all the adjacent cells of with the minimum value. It is nothing but the cell . So jump to this cell.
- Step 5 - We again repeat the process of searching the adjacents, after which we will get cell with the least value. So, we will jump to it, and since it is the destination node our process is complete with a cost of which is .
Implementation
Steps to implement the code -
- Initialize two lists of Node type (say openList and closedList)
- Add src node in openList.
- Till openList is not empty do the following
- Find the node in the openList with the least f value (say x)
- Remove x from openList
- Find and add all the 8 successors of x and add them to openList.
- For each of the successors (say y) do the following -
- If y is the destination then stop the search.
- Otherwise, calculate g and h for y. y.g = x.g + distance between y and x (it is 1 in our case) y.h = distance between destination and y (Here we will be using Euclidean distance for the same). y.f = y.g + y.h
- If a node with the same position as y and lower f is present in openList then skip this successor.
- Else If a node with the same position as y exists in closedList with smaller f than y.f skip this successor.
- Otherwise, add rhe node (y) to the openList.
- Push x is the closedList.
Implementing A* Algorithm in Java
Implementing A* Algorithm in Python
Output -
Complexity Analysis
- Time Complexity - In the worst situation, we may require to traverse through all the edges to reach the destination. Hence in the worst case, the time complexity will be .
- Space Complexity - In the worst scenario, we may have all the vertices (nodes) in openList which will make the worst case space complexity be .
Conclusion
- A* Algorithm in AI can be used to find the minimum cost path in 1 source - 1 destination type problems efficiently.
- It is extensively used in Tower Defense games (where we need to attack the enemy's territory surpassing all obstacles placed by him/her).
- Be careful in choosin the heuristic function, on choosing the wrong one A* algorithm might produce the wrong outputs.