Search Algorithms in Artificial Intelligence
Overview
Search algorithms in artificial intelligence are significant because they provide solutions to many artificial intelligence-related issues. There are a variety of search algorithms in artificial intelligence. The importance and characteristics of search algorithms in AI are covered in this article. Additionally, it will categorize search algorithms in artificial intelligence and list the most often used ones.
Introduction
Search algorithms in AI are algorithms that aid in the resolution of search issues. A search issue comprises the search space, start, and goal state. By evaluating scenarios and alternatives, search algorithms in artificial intelligence assist AI agents in achieving the objective state.
The algorithms provide search solutions by transforming the initial state to the desired state. Therefore, AI machines and applications can only perform search functions and discover viable solutions with these algorithms.
AI agents make artificial intelligence easy. These agents carry out tasks to achieve a specific objective and plan actions that can lead to the intended outcome. The combination of these actions completes the given task. The AI agents discover the best solution by considering all alternatives or solutions. Search algorithms in artificial intelligence are used to find the best possible solutions for AI agents.
Transform Your Career
Choose from our industry-leading programs designed for career success
Modern Software and AI Engineering Program
Master full-stack development with AI integration

Modern Data Science and ML with specialisation in AI
Advanced data science techniques with AI specialization
Advanced AIML with Specialisation in Agentic AI
Deep dive into AIML with focus on Agentic systems
DevOps, Cloud & AI Platform Engineering
Build and manage AI-powered cloud infrastructure
AI Engineering Advanced Certification by IIT-Roorkee
Premier AI engineering certification from IIT-Roorkee
Problem-solving Agents
Building agents with rational behavior is the subject of artificial intelligence research. These agents often use a search algorithm in the background to complete their job. Search techniques are universal problem-solving approaches in Artificial Intelligence. Rational or problem-solving agents mostly use these search strategies or algorithms in AI to solve a particular problem and provide the best result. The goal-based agents are problem-solving agents that use atomic representation. We will learn about different problem-solving search algorithms in AI in this topic.
Stop learning AI in fragments—master a structured AI Engineering Course with hands-on GenAI systems with IIT Roorkee CEC Certification
AI Engineering Course Advanced Certification by IIT-Roorkee CEC
A hands on AI engineering program covering Machine Learning, Generative AI, and LLMs - designed for working professionals & delivered by IIT Roorkee in collaboration with Scaler.
Enrol Now
Search Algorithm Terminologies
- Search - Searching solves a search issue in a given space step by step. Three major factors can influence a search issue.
- Search Space - A search space is a collection of potential solutions a system may have.
- Start State - The jurisdiction where the agent starts the search.
- Goal test - A function that examines the current state and returns whether or not the goal state has been attained.
- Search tree - A Search tree is a tree representation of a search issue. The node at the root of the search tree corresponds to the initial condition.
- Actions - It describes all the steps, activities, or operations accessible to the agent.
- Transition model - It can be used to convey a description of what each action does.
- Path Cost - It is a function that gives a cost to each path.
- Solution - An action sequence connects the start node to the target node.
- Optimal Solution - If a solution has the lowest cost among all solutions, it is said to be the optimal answer.






Properties of Search Algorithms
The four important properties of search algorithms in artificial intelligence for comparing their efficiency are as follows:
- Completeness - A search algorithm is said to be complete if it guarantees to yield a solution for any random input if at least one solution exists.
- Optimality - A solution discovered for an algorithm is considered optimal if it is assumed to be the best solution (lowest path cost) among all other solutions.
- Time complexity - It measures how long an algorithm takes to complete its job.
- Space Complexity - The maximum storage space required during the search, as determined by the problem's complexity.
These characteristics often contrast the effectiveness of various search algorithms in artificial intelligence.
Importance of Search Algorithms in Artificial Intelligence
The following points explain how and why the search algorithms in AI are important:
- Solving problems: Using logical search mechanisms, including problem description, actions, and search space, search algorithms in artificial intelligence improve problem-solving. Applications for route planning, like Google Maps, are one real-world illustration of how search algorithms in AI are utilized to solve problems. These programs employ search algorithms to determine the quickest or shortest path between two locations.
- Search programming: Many AI activities can be coded in terms of searching, which improves the formulation of a given problem's solution.
- Goal-based agents: Goal-based agents' efficiency is improved through search algorithms in artificial intelligence. These agents look for the most optimal course of action that can offer the finest resolution to an issue to solve it.
- Support production systems: Search algorithms in artificial intelligence help production systems run. These systems help AI applications by using rules and methods for putting them into practice. Production systems use search algorithms in artificial intelligence to find the rules that can lead to the required action.
- Neural network systems: The neural network systems also use these algorithms. These computing systems comprise a hidden layer, an input layer, an output layer, and coupled nodes. Neural networks are used to execute many tasks in artificial intelligence. For example, the search for connection weights that will result in the required input-output mapping is improved by search algorithms in AI.
Scaler Placement Report and Statistics
Scaler learners achieved 2.5x salary growth with average post-Scaler CTC reaching ₹23L.
Types of Search Algorithms in AI
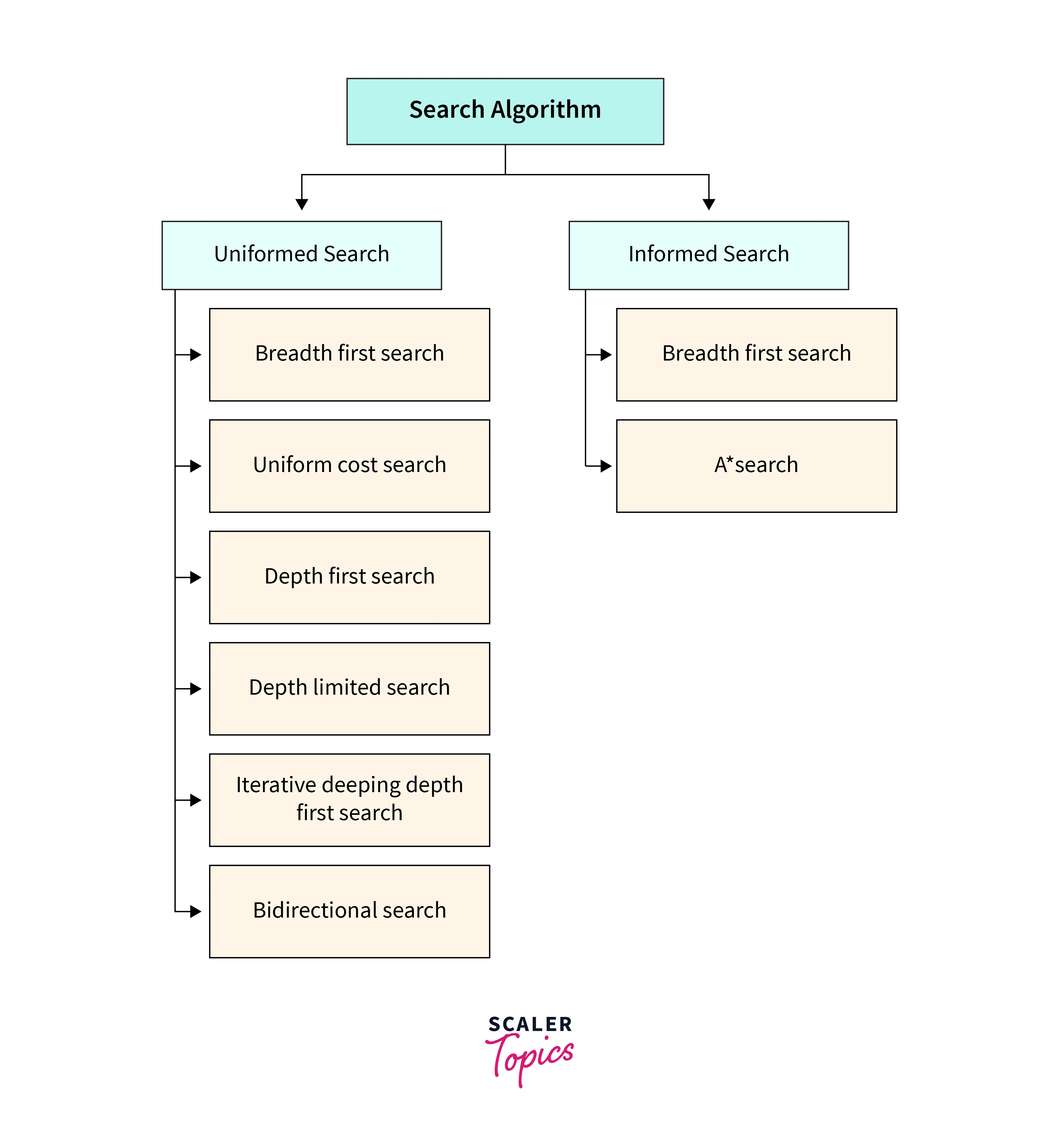
We can divide search algorithms in artificial intelligence into uninformed (Blind search) and informed (Heuristic search) algorithms based on the search issues.
Master structured AI Engineering + GenAI hands-on, earn IIT Roorkee CEC Certification at ₹40,000
AI Engineering Course Advanced Certification by IIT-Roorkee CEC
A hands on AI engineering program covering Machine Learning, Generative AI, and LLMs - designed for working professionals & delivered by IIT Roorkee in collaboration with Scaler.
Enrol NowUninformed/Blind Search
The uninformed search needs domain information, such as proximity or goal location. It works by brute force because it only contains information on traversing the tree and identifying leaf and goal nodes.
Uninformed search is a method of searching a search tree without knowledge of the search space, such as initial state operators and tests for the objective, and is also known as blind search. It goes through each tree node until it reaches the target node. These algorithms are limited to producing successors and distinguishing between goal and non-goal states.
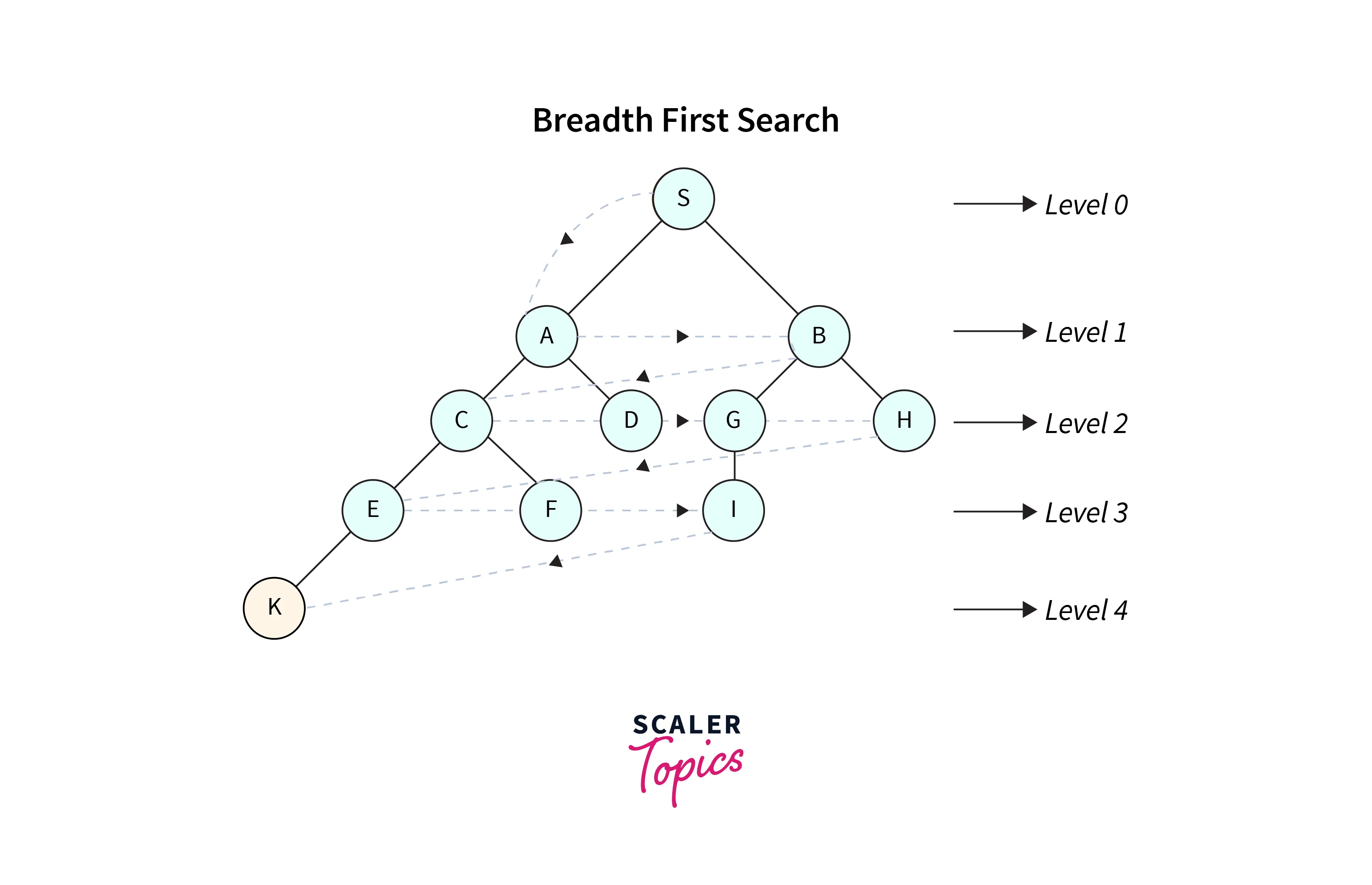
- Breadth-first search - This is a search method for a graph or tree data structure. It starts at the tree root or searches key and goes through the adjacent nodes in the current depth level before moving on to the nodes in the next depth level. It uses the queue data structure that works on the first in, first out (FIFO) concept. It is a complete algorithm as it returns a solution if a solution exists.
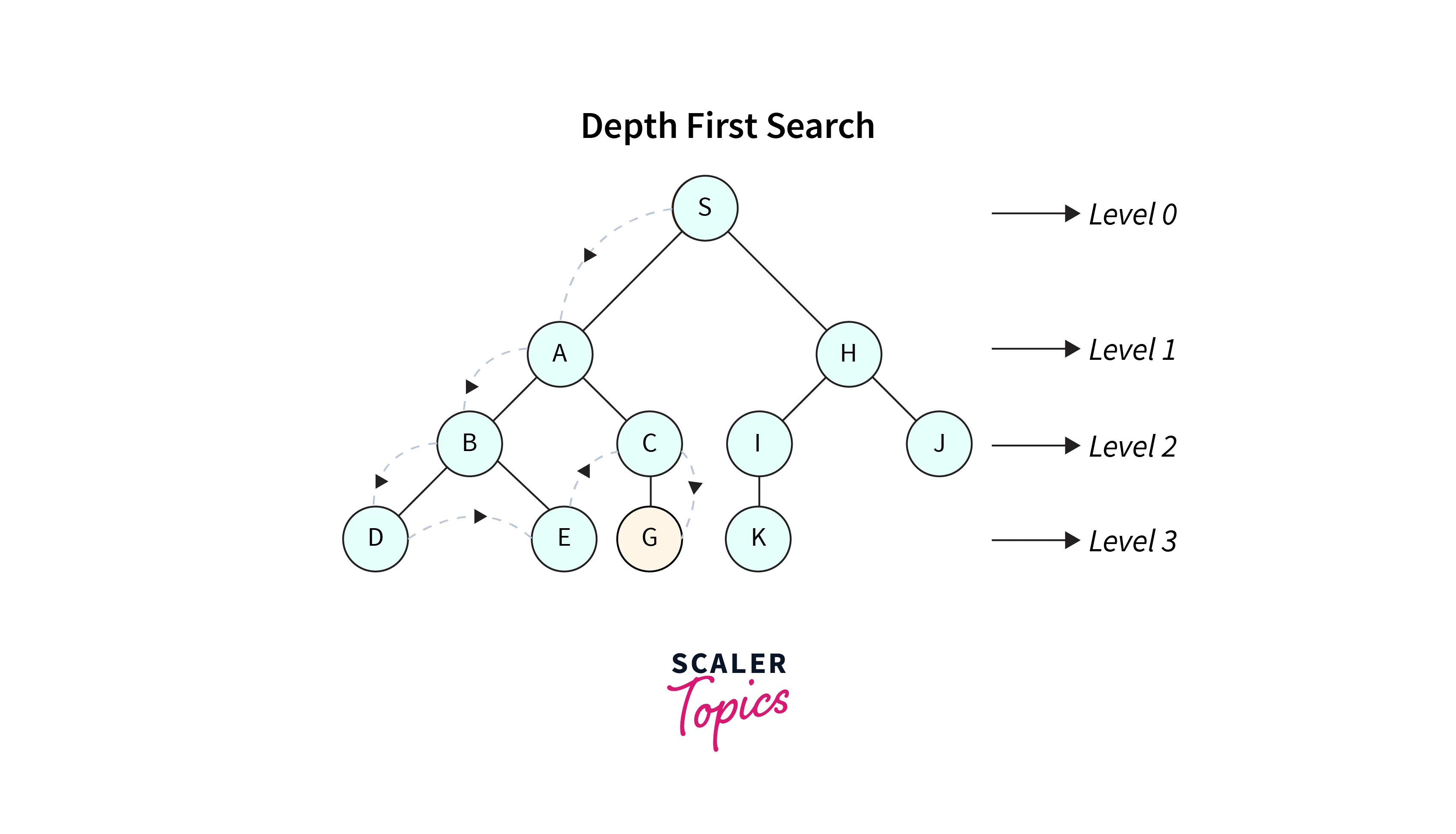
- Depth-first search - It is also an algorithm used to explore graph or tree data structures. It starts at the root node, as opposed to the breadth-first search. It goes through the branch nodes and then returns. It is implemented using a stack data structure that works on the concept of last in, first out (LIFO).
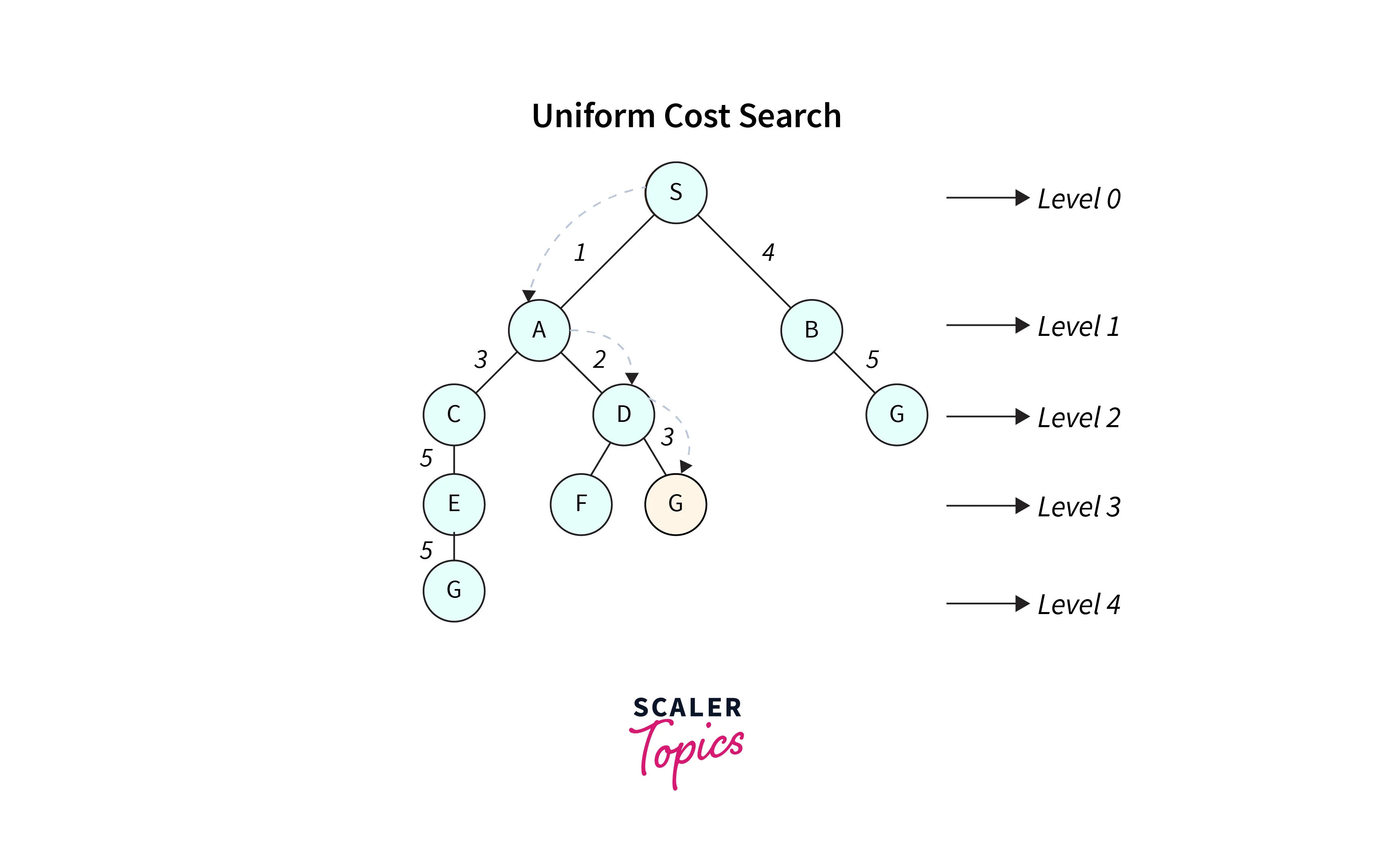
- Uniform cost search(UCS) - Unlike breadth-first and depth-first algorithms, uniform cost search considers the expense. When there are multiple paths to achieving the desired objective, the optimal solution of uniform cost algorithms is the one with the lowest cost. So uniform cost search will check the expense to go to the next node. It will choose the path with the least cost if there are multiple paths. Only finite states and the absence of loops with zero weights make UCS complete. Also, only when there are no negative costs is UCS optimum. It is similar to the breadth-first search if each transition's cost is the same.
- Iterative deepening depth-first search - It performs a depth-first search to level 1, then restarts, completes a depth-first search to level 2, and so on until the answer is found. It only generates a node once all the lower nodes have been produced. It only stores a node stack. The algorithm terminates at depth d when the goal node is found.
Turn Learning into Career Growth
Become the Ai engineer who can design, build, and iterate real AI products, not just demos with an IIT Roorkee CEC Certification
AI Engineering Course Advanced Certification by IIT-Roorkee CEC
A hands on AI engineering program covering Machine Learning, Generative AI, and LLMs - designed for working professionals & delivered by IIT Roorkee in collaboration with Scaler.
Enrol Now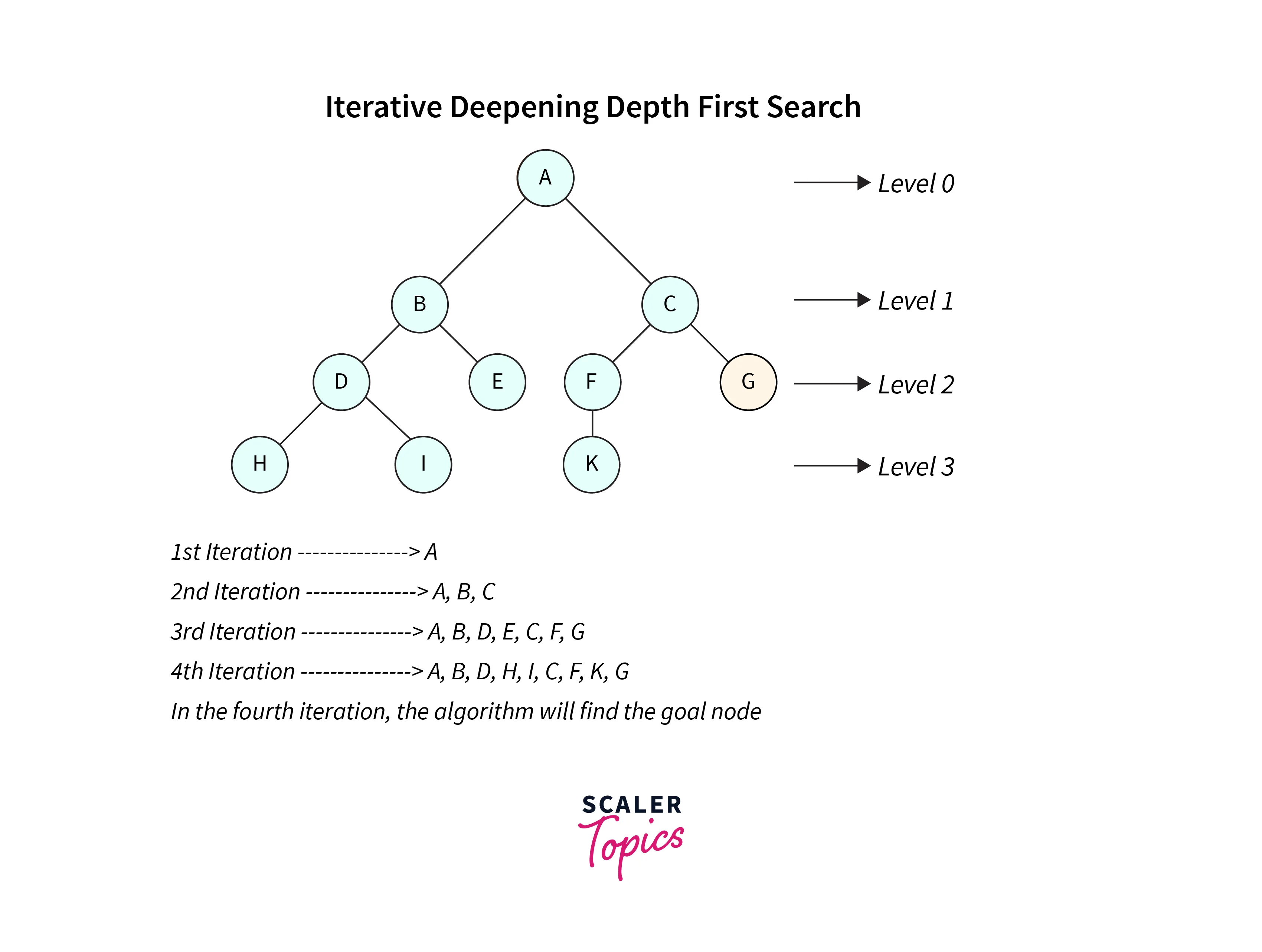
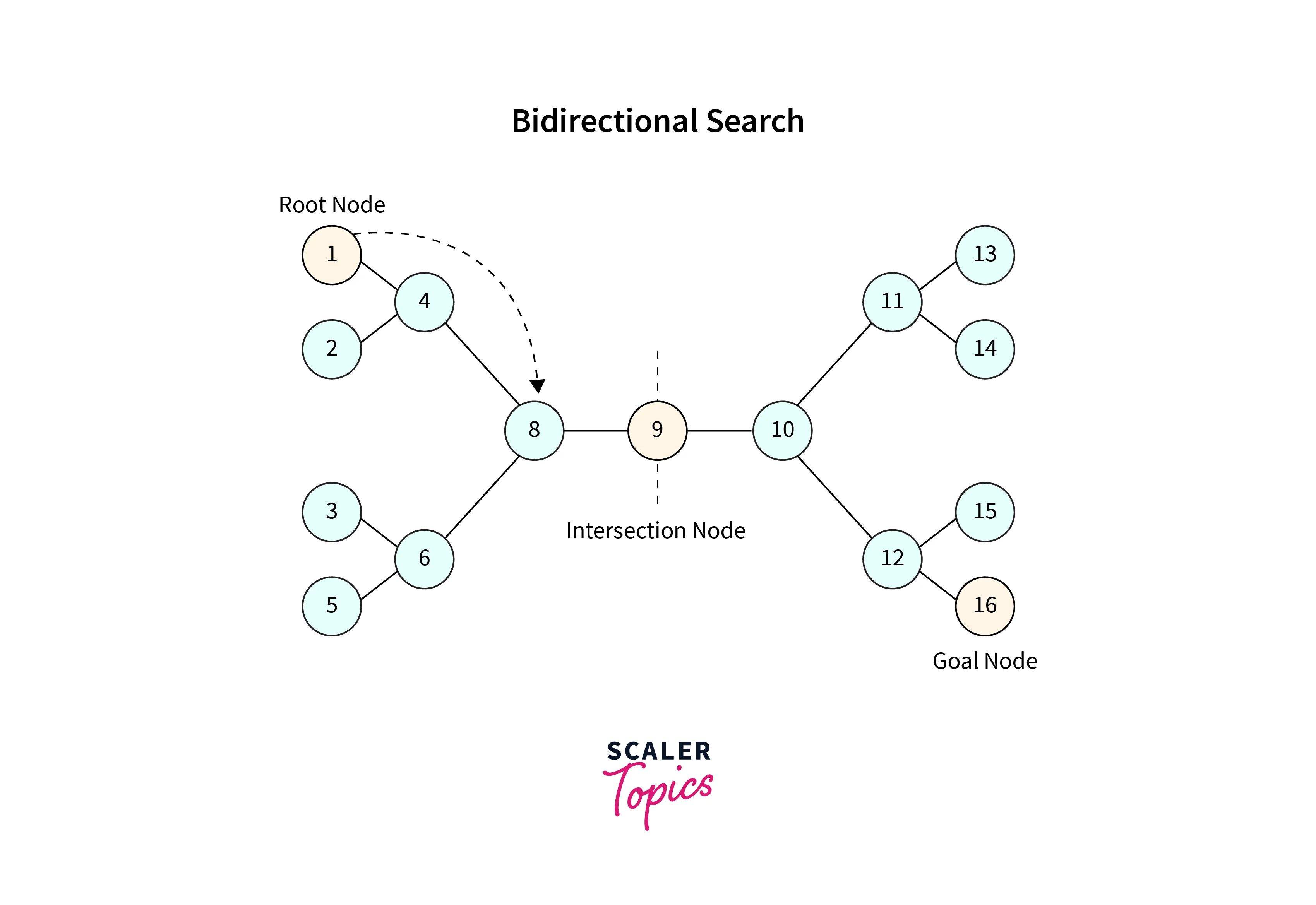
- Bidirectional search - It searches forward from the initial state and backward from the target state until they meet to identify a common state. The route from the initial state is joined to the path from the goal state. Each search only covers half of the entire path.
Informed Search
Informed search algorithms in AI use domain expertise. Problem information is accessible in an informed search, which can guide the search. As a result, informed search strategies are more likely to discover a solution than uninformed ones.
Heuristic search is another name for informed search. A heuristic is a method that, while not always guaranteed to find the best solution, is guaranteed to find a decent solution in a reasonable amount of time. An informed search can answer many complex problems that would be impossible to handle otherwise.
-
Greedy Search - The closest node to the target node is expanded in greedy search algorithms in AI. A heuristic function, h, determines the closeness factor (x). h(x) is a distance estimate between one node and the end or target node. The closer the node is to the endpoint, the smaller the h(x) value. When the greedy search looks for the best route to the target node, it will select nodes with the lowest possible values. This algorithm is implemented through the priority queue. It is not an optimal algorithm. It can get stuck in loops.
For example, imagine a simple game where the goal is to reach a specific location on a board. The player can move in any direction but walls are blocking some paths. In a greedy search approach, the player would always choose the direction that brings them closer to the goal, without considering the potential obstacles or the fact that some paths may lead to dead ends.
If the chosen path leads to a dead end or a loop, the algorithm will keep moving back and forth between the same nodes, without ever exploring other options. This can result in an infinite loop where the algorithm keeps repeating the same steps and fails to find a solution.
-
A* Search - A* Tree Search, known as A* Search, combines the strengths of uniform-cost search and greedy search. To find the best path from the starting state to the desired state, the A* search algorithm investigates all potential paths in a graph or grid. The algorithm calculates the cost of each potential move at each stage using the following two criteria:
- How much it costs to reach the present node?
- The approximate cost from the present node to the goal.
A heuristic function is used to determine the estimated cost and estimate the distance between the current node and the desired state. The acceptable nature of this heuristic function ensures that it never overestimates the actual cost of achieving the goal.
The path with the lowest overall cost is chosen after an A* search examines each potential route based on the sum of the actual cost and the estimated cost (i.e., the cost so far and the estimated cost-to-go). By doing this, the algorithm is guaranteed to always investigate the most promising path first, which is most likely to lead to the desired state.
Conclusion
- Search algorithms in AI are algorithms that aid in the resolution of search issues. A search issue comprises the search space, start, and goal state.
- These algorithms are essential because they aid in solving AI problems and support other systems, such as neural networks and manufacturing systems.
- Search algorithms in artificial intelligence define the problem (initial state, target state, state space, space cost, etc.) and then perform search operations to find the best solution to the given problem.
- Search algorithms in artificial intelligence are classified into two types: informed algorithms and uninformed algorithms. Breadth-first, depth-first, and uniform-cost algorithms are examples of informed algorithms. Greedy, A* tree and A* graph algorithms are examples of uninformed algorithms.
- Vehicle routing, nurse scheduling, record retrieval, and industrial processes are some of AI's most common uses of search algorithms.